
Research Highlights


Strain-Amplifying Braided Sleeve for Soft Energy Harvesting
Research Summary
Objective: To enhance strain sensitivity and energy harvesting performance in soft materials using a helically braided fiber-reinforced sleeve.
Platform: A soft, stretchable electrical double layer (EDL) supercapacitor made of hydrogel and liquid metal electrodes.
Dual Design & Optimization Benefits
-
Mechanical reinforcement without damaging hydrogel.
-
Improved sensitivity to axial deformation.
Impact & Applications:
-
Applicable to soft robotics, wearable strain sensors, and energy harvesters.
-
Especially promising for aqueous environments like ocean wave energy harvesting.
Optimizing hydraulic actuator systems with Genetic Algorithm
Research Summary
Goal: To develop a multi-objective genetic algorithm-based optimization framework for designing fluidic artificial muscle (FAM) bundles within spatial constraints.
Key Findings
-
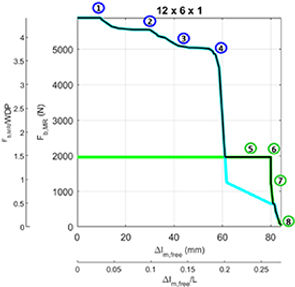
Pareto Frontier Analysis maps optimal designs trade off force vs. stroke, revealed how aspect ratio and spatial envelope geometry influence bundle performance, and identified when lateral vs. central arrangements are preferred based on desired output.
-
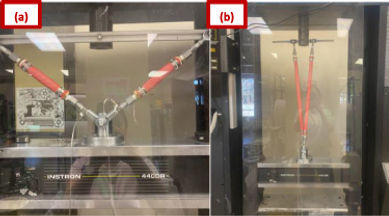
Experimental validation with fabricated and tested several actuator bundle configuration designs from Pareto Frontier and results aligned with model predictions.
Impact & Applications
-
Robotic Design: Offers framework to determine optimal actuator configurations for robotic limbs and guide actuator placement in systems based on force, range of motion, and spatial constraints
-
Broader Relevance: applicable beyond FAMs to other soft actuators constrained by geometry.
Constrained Bipennate Topology for Fluidic Muscle Actuation
Research Summary
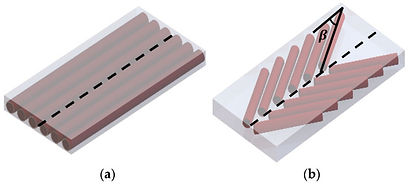
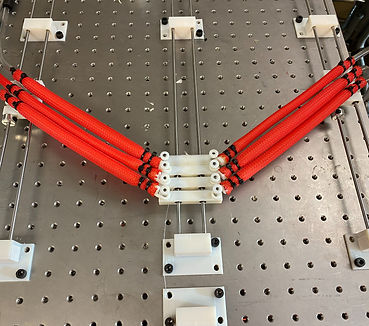
Objective: To explore how bipennate arrangements affect performance of fluidic artificial muscle (FAM) bundles under spatial constraints.
Key Findings
-
Bipennate topology advantage outperform parallel configurations in force, contractile stroke, stiffness, and work output when properly designed.
-
Design trade-offs in performance depend heavily on initial pennation angle and actuator arrangement. High pennation angles may hinder contraction, mimicking limitations seen in biological muscles.
Impact
-
Offers framework to tailor artificial muscle bundle for specific spatial and mechanical requirements.
-
Enhance understanding of how bio-inspired geometries can be leveraged for compliant, efficient actuation.
-
Open pathways for safer and more adaptable human-robot interaction
Robotics Institute Summer Scholars (RISS) Program
Carnegie Mellon University
Research Summary: Explore multi-agent planning and coordination and create simulated UAV-UGV swarms in Gazebo using ROS for DARPA's OFFSET program.
Published in peer-reviewed RISS Working Paper Journal

Automotive and Clean Energy Discoveries (ACED) Program
Oakland University
Formerly Automotive and Energy Research and Industrial Mentorship (AERIM) REU
Research Summary: Simulate material undergo stamping process for automotive material testing and develop non-direct contact method to measure material properties and observe material behavior (i.e. friction coefficient, mechanical strength).
Published research findings and results in SAE Technical Paper

